I’ve just finished the developing an idea I had a few months ago: the SkypeRobot.
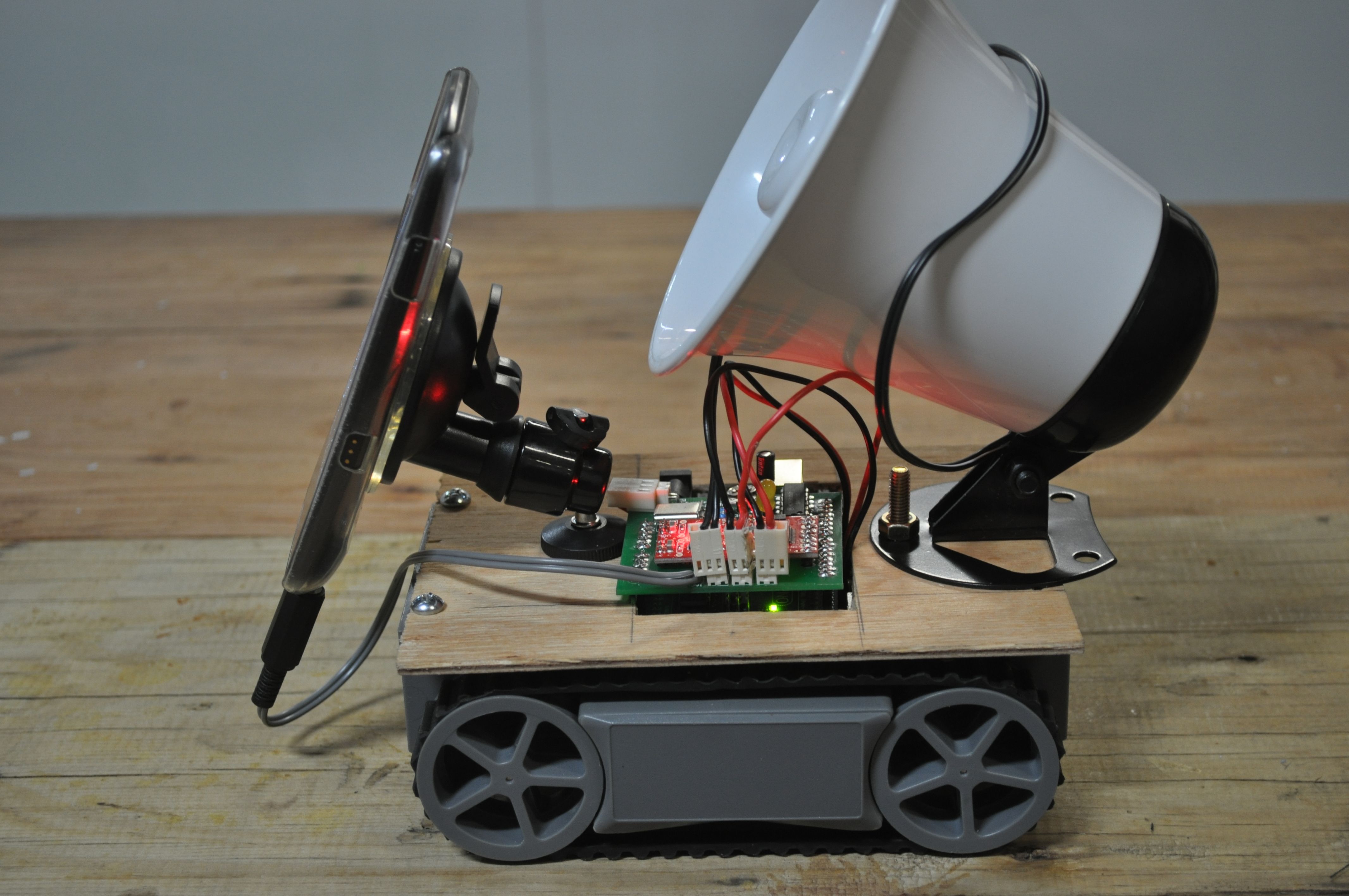
SkypeRobot is a nice straightforward solution for telepresence robotics: all of the point-to-point infrastructure is black-boxed and handled by someone else, as well as the specifics of the video connection. At it’s heart is a custom Arduino shield that uses DTMF dial tones (that can be generated within Skype, for example) to control the robot platform. You’re free to decide what you want to attach to it, and what software to use: iPhone, Android, iPad, or generic tablet, connected via 3G, 4G, Wifi, etc. and running Skype, Google Video chat, or whatever.
If you are interested in getting your own SkypeRobot, I’m considering options and formats for sharing the hardware. Possibilities are unpopulated circuit boards, DIY kits with all the parts, or fully assembled. The circuit-board design and Arduino code are available below for use for free.
[iframe https://docs.google.com/spreadsheet/embeddedform?formkey=dDItdXU3c0NtTXQxRDd5UEl5aXlNSXc6MQ 760 730]The current Arduino shield Schematics, Board Design, and Arduino code available for free. Please consider donating a few dollars to support my research and improvements to the design and code:
[paypal-donation] (or you can download them via GitHub).
Android controlled robot extravaganza – Hack a Day
Aug 5, 2012 -
[…] yeah’ and [Josh] scurried off to his workshop for a few months. He’s back with his tank-based robot. One really interesting bit is the robot responds to DTMF tones, allowing it to be controlled […]
Control de Robot – Android | Blu3Ston3
Aug 5, 2012 -
[…] “Hell Yeah” y [Josh] se escabulló a su taller por unos meses. Está de vuelta con su tanque robot de. Un poco realmente interesante es que el robot responde a tonos DTMF, lo que le permite ser […]